テストに使用するプログラム:
|
#!/usr/bin/env python
import RPi.GPIO as GPIO
from time import sleep
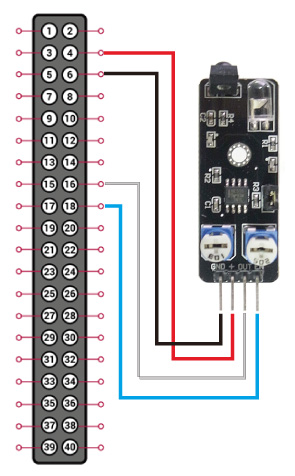
TransmitterPin = 18
ReceiverPin = 16
delayTime = 1
def setup():
# Set the GPIO pins as numbering
GPIO.setmode(GPIO.BOARD)
# Set the ReceiverPin's mode is input, and (Detected→) ON→ LOW
GPIO.setup(ReceiverPin, GPIO.IN, pull_up_down=GPIO.PUD_UP)
# Set the TransmitterPin's mode is output
GPIO.setup(TransmitterPin, GPIO.OUT)
# Set the TransmitterPin high(+3.3V)
GPIO.output(TransmitterPin, GPIO.HIGH)
def loop():
while True:
if GPIO.input(ReceiverPin's) == GPIO.HIGH:
print 'No obstacle'
sleep(delayTime)
else:
print 'Obstacle detected'
sleep(delayTime)
def destroy():
# Release resource
GPIO.cleanup()
# The Program will start from here
if __name__ == '__main__':
setup()
try:
loop()
# When control c is pressed child program destroy() will be executed.
except KeyboardInterrupt:
destroy()
|
$ vi ky_032.py
$ chmod +x ky_032.py
$ ./ky_032.py
white
No obstacle
No obstacle
No obstacle
No obstacle
No obstacle
No obstacle
^C
Obstacle detected にならない。
IR Transmitter (LED) が壊れているのかも。
|
#!/usr/bin/env python
import RPi.GPIO as GPIO
TransmitterPin = 18
ReceiverPin = 16
def setup():
# Set the GPIO pins as numbering
GPIO.setmode(GPIO.BOARD)
# Set the ReceiverPin's mode is input, and (Detected→) ON→ LOW
GPIO.setup(ReceiverPin, GPIO.IN, pull_up_down=GPIO.PUD_UP)
# Set the TransmitterPin's mode is output
GPIO.setup(TransmitterPin, GPIO.OUT)
# Set the TransmitterPin high(+3.3V)
GPIO.output(TransmitterPin, GPIO.HIGH)
def destroy():
# Release resource
GPIO.cleanup()
def loop():
while True:
if GPIO.input(ReceiverPin) == GPIO.LOW:
destroy()
print 'Obstacle detected'
break
# The Program will start from here
if __name__ == '__main__':
setup()
try:
loop()
# When control c is pressed child program destroy() will be executed.
except KeyboardInterrupt:
destroy()
|
$ vi ky_032_a.py
$ chmod +x ky_032_a.py
$ ./ky_032_a.py
|