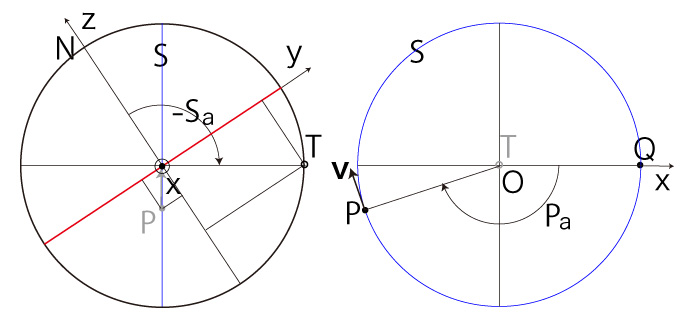
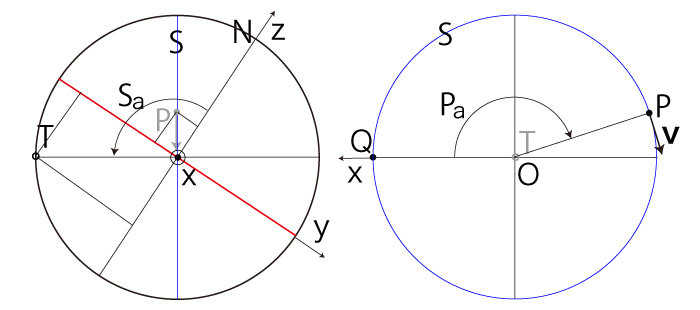
ここでは,\( P,\ \bf{v} \) の座標を表現するためのパラメータ \( (S_a, P_a ) \) を導入する。 \( (P, \bf{v} ) \)-法点を \( T \) とする。 そして,回転角度 \( S_a,\ P_a \) をつぎのように定義する:
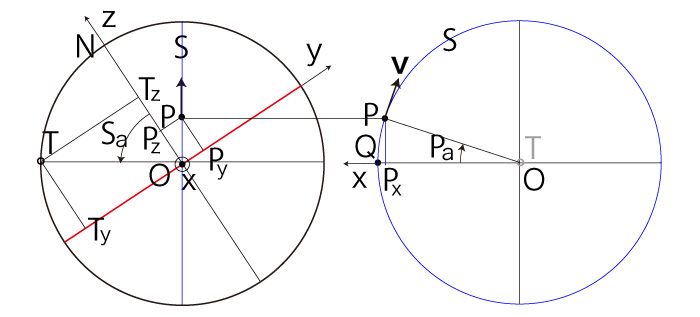
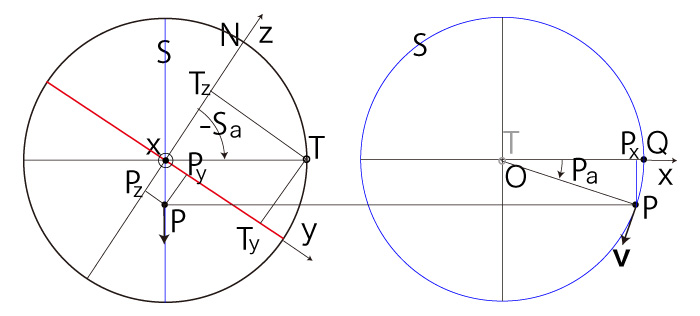
以下に,\( P\, T \) の座標と \( ( S_a,\ P_a ) \) の対応を示す: \( P_z > 0 \) の場合──即ち,\( P \) が北半球にある場合 \( P_x \geqq 0,\ P_y \geqq 0 \) のとき, |
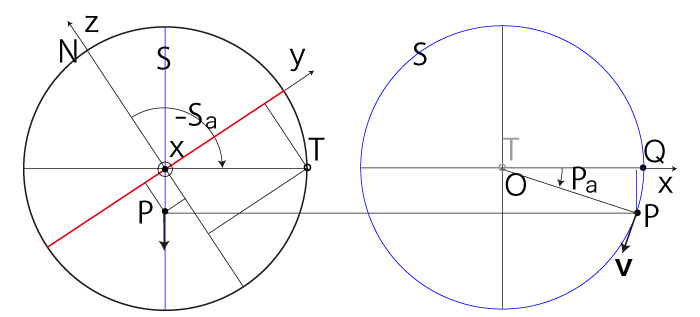
\( P_x \geqq 0,\ P_y < 0 \) のとき, |
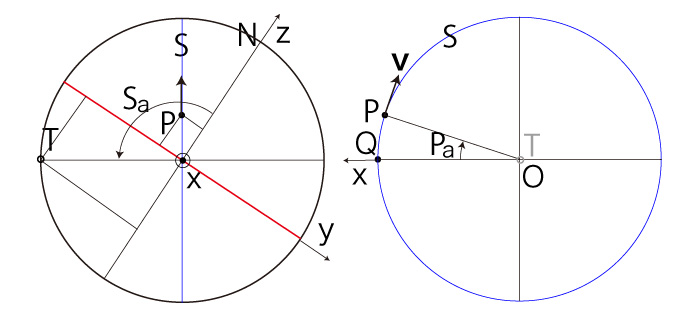
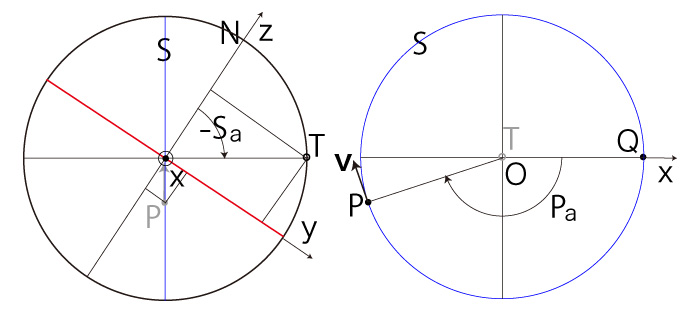
\( P_x < 0,\ P_y \geqq 0 \) のとき, |
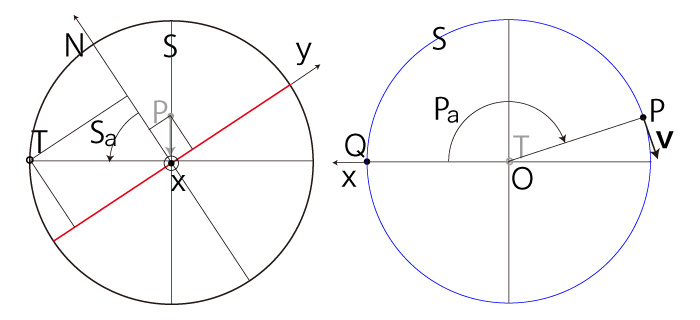
\( P_x < 0,\ P_y < 0 \) のとき, |
\( P_z < 0 \) の場合──即ち,\( P \) が南半球にある場合 \( P_x \geqq 0,\ P_y \geqq 0 \) のとき, |
|
|
|