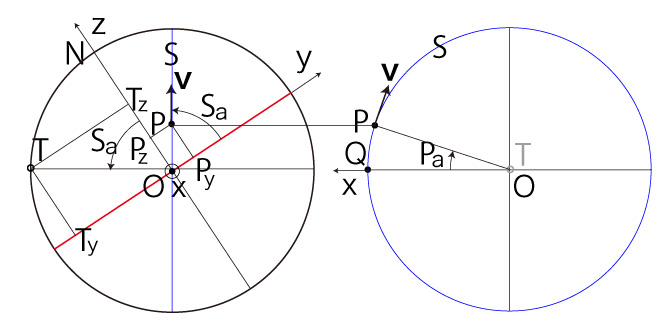
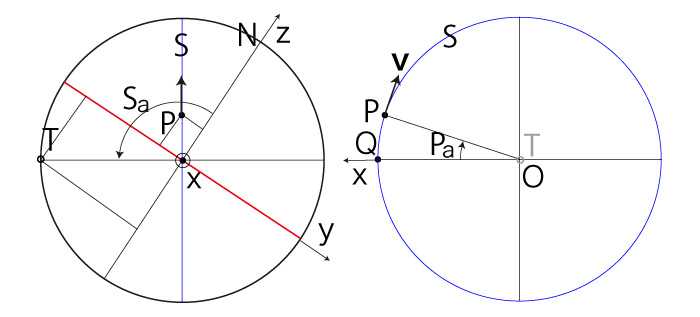
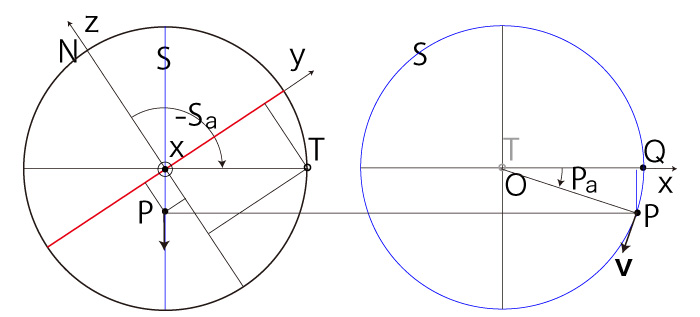
\( (S_a, P_a ) \) は,\( P = ( P_x,\ P_y,\ P_z ),\ T = ( 0,\ T_y,\ T_z )\) を表そうとするものである。 表現式を当て込むために,\( P_x > 0,\ P_y > 0,\ P_z > 0 \) の場合でやってみると:
|
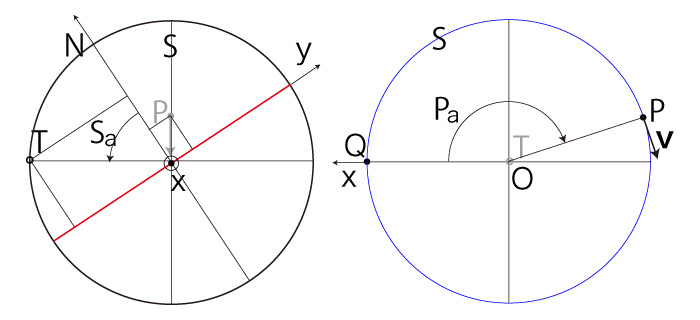
この式──以下「<式>」と呼ぶ──は,すべての場合で成り立つか? 以下,これを見ていく。 先ず,\( P_a = 0 \) は,\( P = Q \) ──即ち \( P_z = 0 \) ──を意味する。 \( S_a = 0 \) は,S が赤道であること──即ち \( v_z = 0 \) ──を意味する。 特に,\( S_a = 0 \) は \( P_a = 0 \) を含意する。 |
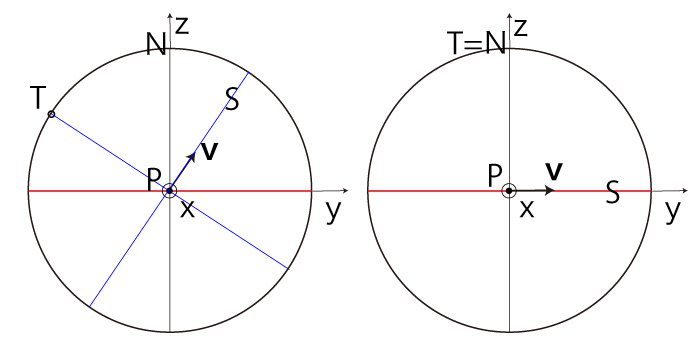
\( P_z = 0 \) のとき,
|
一方,\( P_a = 0 \) のとき,
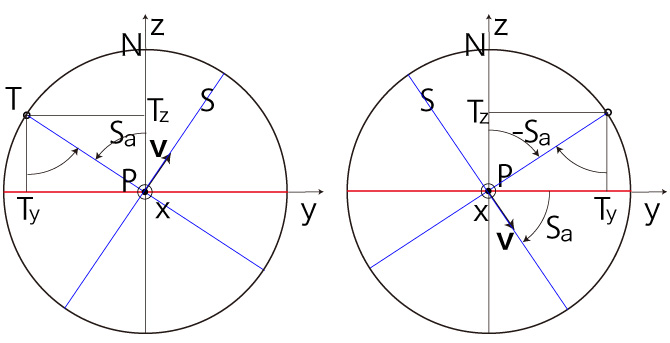
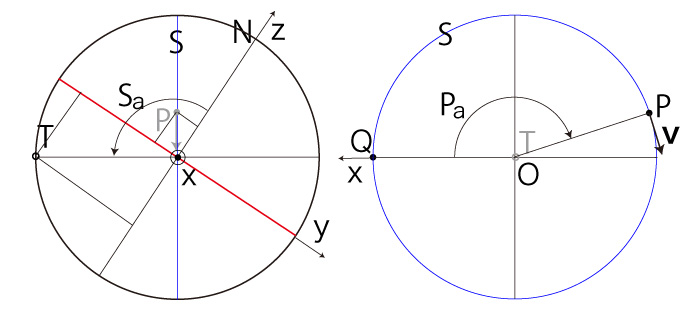
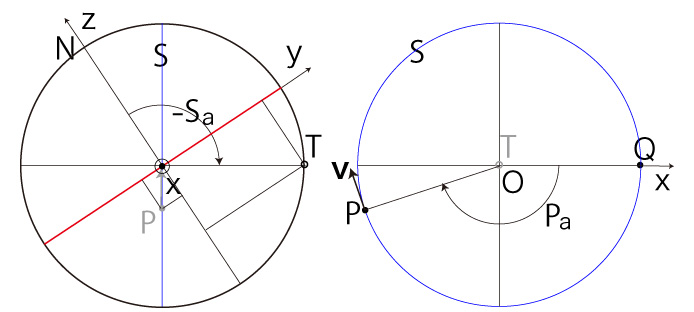
よって,<式>は \( P_a = 0 \) の場合を含む。 \( P_z > 0 \) の場合──即ち,\( P \) が北半球にある場合 \( P_x \geqq 0,\ P_y \geqq 0 \) のとき, |
\( P_x \geqq 0,\ P_y < 0 \) のとき, |
\( P_x < 0,\ P_y \geqq 0 \) のとき, |
\( P_x < 0,\ P_y < 0 \) のとき, |
どの場合も,
\( P_x,\ P_y,\ P_z,\ T_y,\ T_z \) の値の正負は:
これに対し,
そして \( sin( P_a ) > 0 \) なので,
したがって,
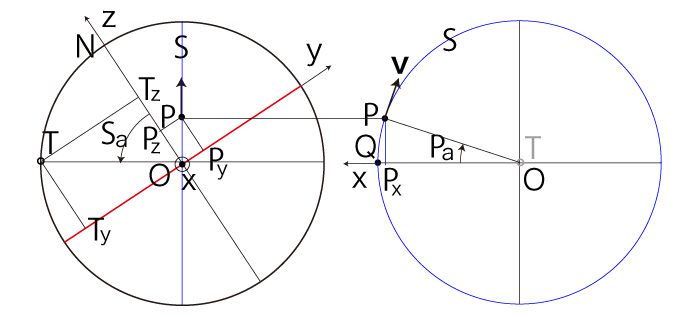
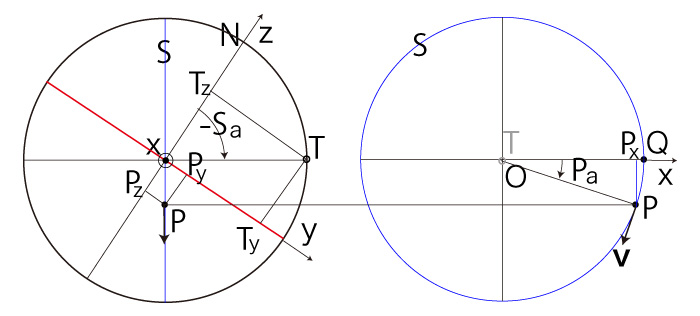
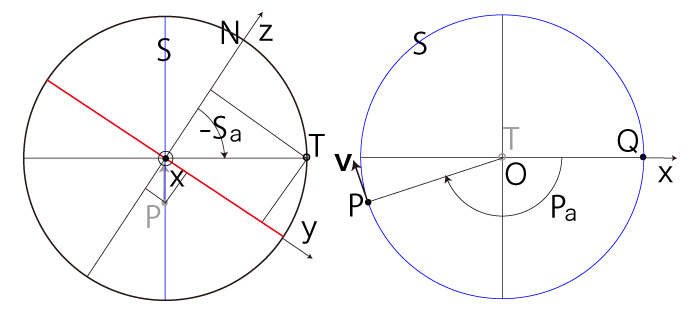
即ち,<式>は \( P_z > 0 \) の場合 の場合を含む。 \( P_z < 0 \) の場合──即ち,\( P \) が南半球にある場合 \( P_x \geqq 0,\ P_y \geqq 0 \) のとき, |
|
|
|
\( P_x,\ P_y,\ T_y,\ T_z \) の値の正負は:
このとき,
そして \( sin( P_a ) > 0 \) なので,
したがって,
即ち,<式>は \( P_z < 0 \) の場合を含む。 まとめ
|