ここでは,この逆をする。 即ち,\( S_a,\ P_a \) を,\( P_x,\ P_y,\ P_z \) で表す。 これは,\( P_x = R,\ P_y = P_z = 0,\ v_x = v_z = 0 \) の場合である。 そしてこれは,\( T \) が極になっている場合,即ち \( T_y = 0,\ T_z = \pm R \) の場合である。 このとき \( T_z \) が \( \pm R \) のいずれであるかを決めるのは,赤道に乗っている \( \bf{v} \) の方向,即ち \( v_y \)。 |
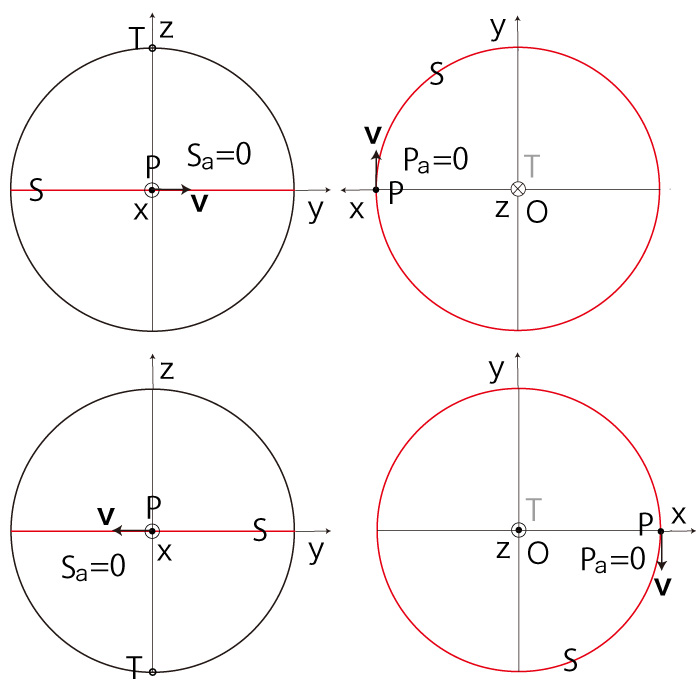
このとき, \[ cos( S_a ) = cos( 0 ) = 1 \\ sin( S_a ) = sin( 0 ) = 0 \\ cos( P_a ) = cos( 0 ) = 1 \\ sin( P_a ) = sin( 0 ) = 0 \\ \] これは,\( P_y = 0,\ v_y = 0 \) の場合である。 そしてこれは,これは,\( T_y = \pm R,\ T_z = 0 \) の場合である。 このとき \( T_y \) が \( \pm R \) のいずれであるかを決めるのは,経線に乗っている \( \bf{v} \) の方向,即ち \( v_z \)。 |
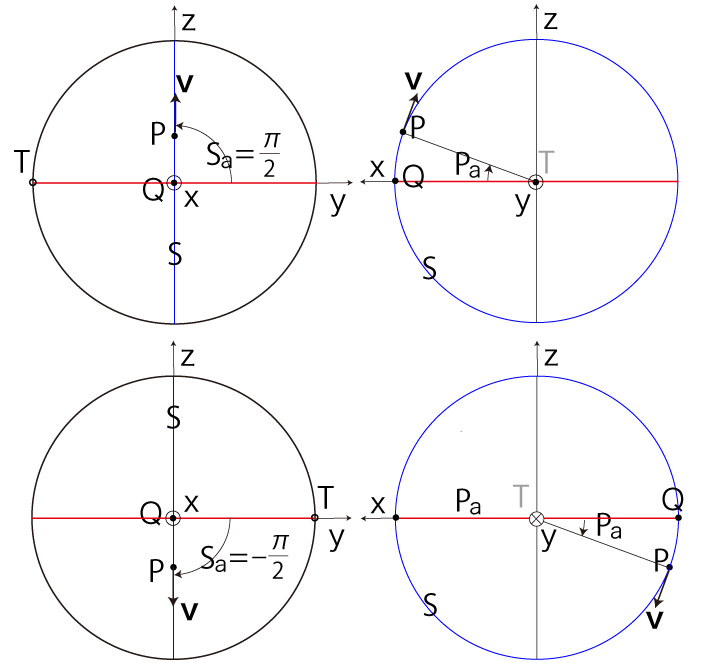
このとき, \[ cos( S_a ) = cos \bigl( \frac{ \pi }{ 2 } \bigr) = 0 \\ sin( S_a ) = \begin{cases} sin \bigl( \frac{ \pi }{ 2 } \bigr) = 1 & ( P_z > 0 ) \\ sin \bigl( - \frac{ \pi }{ 2 } \bigr) = -1 & ( P_z < 0 ) \\ \end{cases} \\ cos( P_a ) = \frac{ P_x }{ R } \\ sin( P_a ) = \frac{ P_z }{ R } \\ \] これは,\( P_x = R,\ P_y = P_z = 0 \) の場合である。 また,このとき \( T \) が定まるためには,\( v_y,\ v_z \) の両方が定まらねばならない。 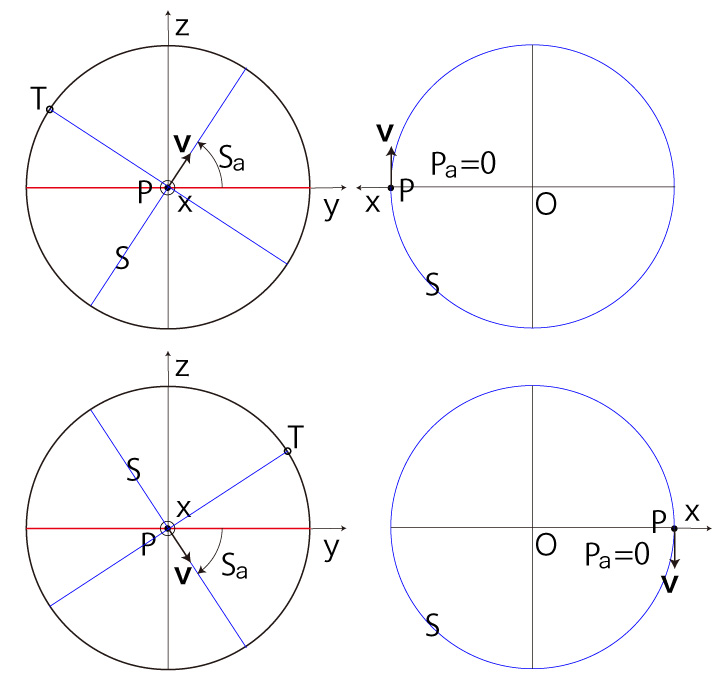
このとき, \[ cos( S_a ) = R\ \frac{ v_y }{ v } \\ sin( S_a ) = R\ \frac{ v_z }{ v } \\ cos( P_a ) = cos( 0 ) = 1 \\ sin( P_a ) = sin( 0 ) = 0 \\ \] このとき, \[ T_y = - R\ \frac{ P_z }{ \sqrt{ R^2 - P_x^2 } } \\ T_z = R\ \frac{ P_y }{ \sqrt{ R^2 - P_x^2 } } \\ \] これと \[ T_y = - R\ sin( S_a ) \\ T_z = R\ cos( S_a ) \\ \] から, \[ cos( S_a ) = \frac{T_z }{R} = \frac{ P_y }{ \sqrt{ R^2 - P_x^2 } } \\ sin( S_a ) = - \frac{T_y }{R} = \frac{ P_z }{ \sqrt{ R^2 - P_x^2 } } \\ \] そして
── \( S \) が赤道の場合
── \( S \) が経線の場合
── \( P \) が赤道上にある場合
|
 \( (P, {\bf{v}} ) \)-法点の \( P_x, P_y, P_z, v_x, v_y, v_z \)-表現 (1)
\( (P, {\bf{v}} ) \)-法点の \( P_x, P_y, P_z, v_x, v_y, v_z \)-表現 (1)