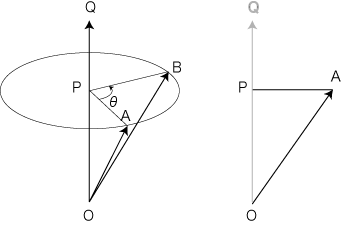
Q の座標 (qx, qy, qz),A の座標 (ax, ay, az),角度θ に対する B の座標 (bx, by, bz) は,直接計算して,つぎのようになりました ( 回転の計算): 回転の計算):
| bx = |
(
cosθ
+
qx2
ー
qx2
cosθ
)
ax
+
(
qx
qy
ー
qx
qy
cosθ
ー
qz
sinθ
)
ay
+
(
qx
qz
ー
qx
qz
cosθ
+
qy
sinθ
)
az
|
| by = |
(
cosθ
+
qy2
ー
qy2
cosθ
)
ay
+
(
qy
qz
ー
qy
qz
cosθ
ー
qx
sinθ
)
az
+
(
qy
qx
ー
qy
qx
cosθ
+
qz
sinθ
)
ax
|
| bz = |
(
cosθ
+
qz2
ー
qz2
cosθ
)
az
+
(
qz
qx
ー
qz
qx
cosθ
ー
qy
sinθ
)
ax
+
(
qz
qy
ー
qz
qy
cosθ
+
qx
sinθ
)
ay
|
これを,つぎのように変形します:
bx =
(
cosθ
+
qx2
ー
qx2
cosθ
)
ax
+
(
qx
qy
ー
qx
qy
cosθ
ー
qz
sinθ
)
ay
+
(
qx
qz
ー
qx
qz
cosθ
+
qy
sinθ
)
az
=
(
cos2(θ/2)
ー
sin2(θ/2)
+
qx2
ー
qx2
( 1 ー 2 sin2(θ/2) )
)
ax
+
(
qx
qy
ー
qx
qy
( 1 ー 2 sin2(θ/2) )
ー
qz
2 cos(θ/2) sin(θ/2)
)
ay
+
(
qx
qz
ー
qx
qz
( 1 ー 2 sin2(θ/2) )
+
qy
2 cos(θ/2) sin(θ/2)
)
az
=
(
cos2(θ/2)
ー
(
qx2
+
qy2
+
qz2
)
sin2(θ/2)
+ 2
qx2
sin2(θ/2)
)
ax
+ 2
(
ー
cos(θ/2)
qz
sin(θ/2)
+
qx
sin(θ/2)
qy
sin(θ/2)
)
ay
+ 2
(
cos(θ/2)
qy
sin(θ/2)
+
qx
sin(θ/2)
qz
sin(θ/2)
)
az
=
(
cos2(θ/2)
+
qx2
sin2(θ/2)
ー
qy2
sin2(θ/2)
ー
qz2
sin2(θ/2)
)
ax
+ 2
(
ー
cos(θ/2)
qz
sin(θ/2)
+
qx
sin(θ/2)
qy
sin(θ/2)
)
ay
+ 2
(
cos(θ/2)
qy
sin(θ/2)
+
qx
sin(θ/2)
qz
sin(θ/2)
)
az
同様に:
| by = |
(
cos2(θ/2)
ー
qx2
sin2(θ/2)
+
qy2
sin2(θ/2)
ー
qz2
sin2(θ/2)
+ 2
(
ー
cos(θ/2)
qx
sin(θ/2)
+
qy
sin(θ/2)
qz
sin(θ/2)
)
az
+ 2
(
cos(θ/2)
qz
sin(θ/2)
+
qx
sin(θ/2)
qy
sin(θ/2)
)
ax
|
| bz = |
(
cos2(θ/2)
ー
qx2
sin2(θ/2)
ー
qy2
sin2(θ/2)
+
qz2
sin2(θ/2)
)
az
+ 2
(
ー
cos(θ/2)
qy
sin(θ/2)
+
qx
sin(θ/2)
qz
sin(θ/2)
)
ax
+ 2
(
cos(θ/2)
qx
sin(θ/2)
+
qy
sin(θ/2)
qz
sin(θ/2)
)
ay
|
そしてこれを,つぎの「3次元実ベクトルで閉じる四元数倍のパターン」( 3次元ベクトルの四元数倍は?) と比較します:
| |
(fr + fx i + fy j + fz k )
×
(ax i + ay j + az k )
×
(fr ー fx i ー fy j ー fz k )
= (
(
fr2
+
fx2
ー
fy2
ー
fz2
)
ax
+ 2 (
ー
fr
fz
+
fx
fy
)
ay
+ 2 (
fr
fy
+ 2
fx
fz
)
az
) i
+ (
(
fr2
ー
fx2
+
fy2
ー
fz2
)
ay
+ 2 (
ー
fr
fx
+
fy
fz
)
az
+ 2 (
fr
fz
+
fx
fy
)
ax
) j
+ (
(
fr2
ー
fx2
ー
fy2
+
fz2
)
az
+ 2 (
ー
fr
fy
+
fx
fz
)
ax
+ 2 (
fr
fx
+
fy
fz
)
ay
) k
|
この比較から,つぎの公式を得ます:
(
cos(θ/2)
+ qx sin(θ/2) i
+ qy sin(θ/2) j
+ qz sin(θ/2) k
)
×
(ax i
+ ay j
+ az k)
×
(
cos(ーθ/2)
+ qx sin(ーθ/2) i
+ qy sin(ーθ/2) j
+ qz sin(ーθ/2) k
)
=
bx i
+by j
+bz k
|