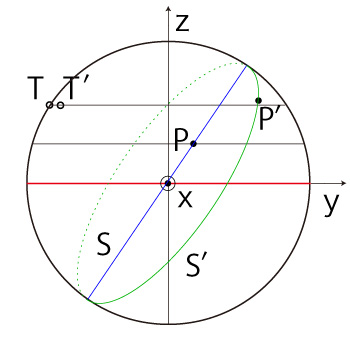
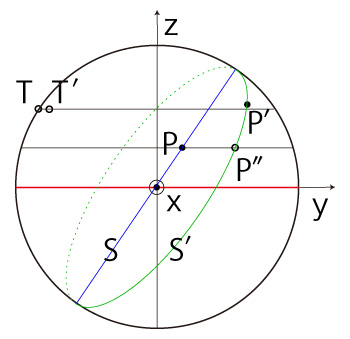
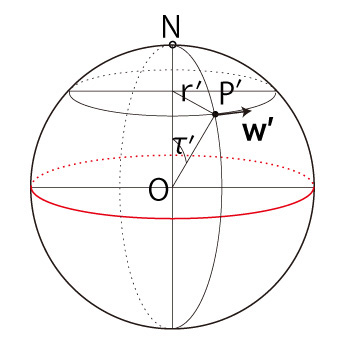
この球体の表面を移動する。 移動は,点 \( P \) において速度が \( {\bf{v}} \) であるとする。 球体は,自転する球体である。 自転は,球体の中心 \( O \) と球面上の点 \( N \) を通る直線を回転軸とし,\( O \) から \( N \) を見て右回りであるとする: 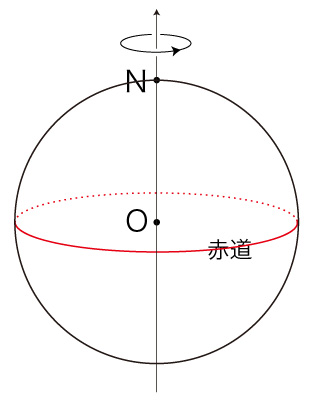 \( P,\ \bf{v} \) に対し,\( (P, \bf{v} ) \)-座標を設定する。 \( (P, \bf{v} ) \)-座標起点を \( Q \), \( (P, \bf{v} ) \)-大円を \( S \) で表す。 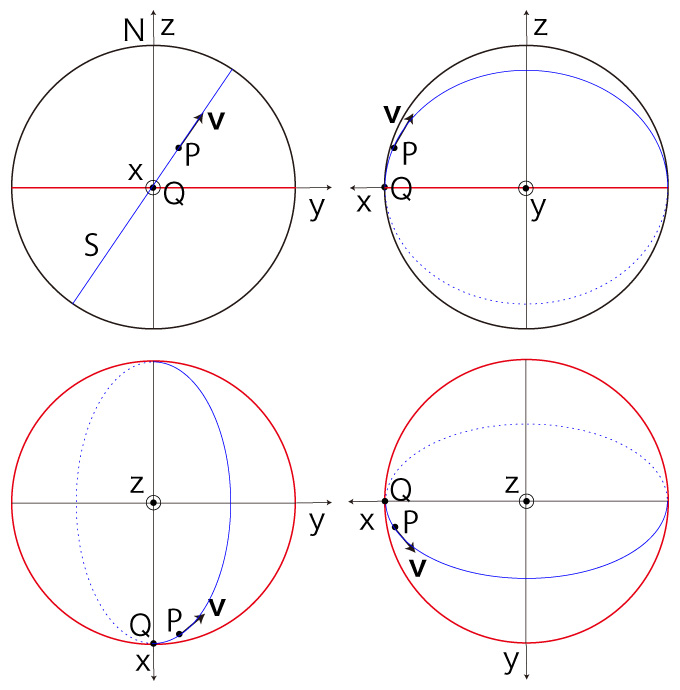 そして,この \( (P, \bf{v} ) \)-座標を球体座標として固定する。 この座標系からは,球体の自転が見えないことに留意せよ。 実際,これをすることにより,<移動>が捉えられるようになるわけである。 速さ \( v = | \bf{v} | \) の移動は,\( P \) での速度 \( \bf{v} \) の向きを変えることになる。 この変化が,「加速度」に表現される。 また移動は,位置の変化により,慣性力加速度を被ることになる。 即ち,球体の自転による球面上の回転速度が緯度によって異なることで,緯度を変える移動は,回転速度の変化を慣性力加速度として被ることになる。 以上を踏まえたところで,つぎの設定をする: 時間 \( \Delta t \) で,\( P \) から点 \( P' \) に移動したとする。 \( P' \) において移動速度が \( \bf{v'} \) になったとする。 \( P' \) を通り \( \bf{v'} \) が接ベクトルになる大円を \( S' \) とする。 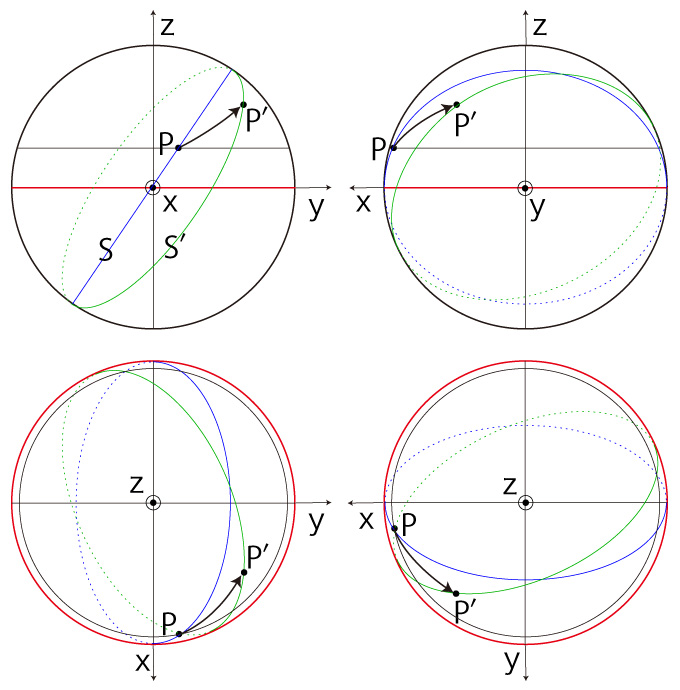 球体の自転による \( P \) における回転速度を \( \bf{w} \),\( P' \) における回転速度を \( \bf{w'} \) とする。 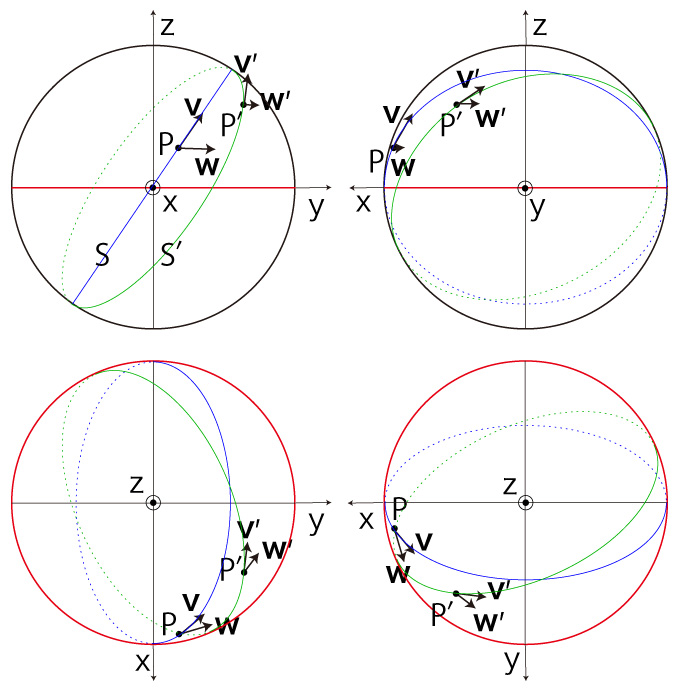 \( ( P,\bf{v} )\)-座標は自転球体に固定の座標なので,\( P \) から \( P' \) に移動するときの速度の変化は:
以下,この加速度を求める。 球体の半径の長さを \( R \) とする。 \( P = ( P_x,\ P_y,\ P_z ),\ T = ( 0,\ T_y,\ T_z ) \) を,パラメータ \( (S_a, P_a) \) で表す:
\( {\bf v} = ( v_x,\ v_y,\ v_z ) \) は, \[ v_x = - v\ sin( P_a ) \\ v_y = v\ cos( S_a )\ cos( P_a ) \\ v_z = v\ sin( S_a )\ cos( P_a ) \\ \] 球体の自転の角速度を \( \Omega \) とする。 \( {\bf w} = ( w_x,\ w_y,\ w_z ) \) は,
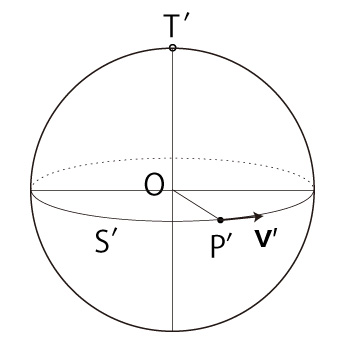
\( \overrightarrow{OT'} \) が \( S' \) の法線ベクトルとなる点 \( T' \) をとる。 \( T' \) の座標 \( (T'_x,\ T'_y,\ T'_z ) \) は, \[ T'_x = R\ sin( S_a ) sin(\Omega \Delta t) \\ T'_y = - R\ sin( S_a ) cos(\Omega \Delta t) \\ T'_z = R\ cos( S_a ) \]
 \(P' \) の座標 \( (P'_x,\ P'_y,\ P'_z ) \) は, \[ \begin{align} P'_x = R \Bigl( & cos( P_a )\ cos( (V/R) \Delta t )\ cos(\Omega \Delta t) \\ & - sin( P_a )\ sin( (V/R) \Delta t )\ cos(\Omega \Delta t) \\ & - cos(S_a)\ sin( P_a )\ cos( (V/R) \Delta t )\ sin(\Omega \Delta t) \\ & - cos(S_a)\ cos( P_a )\ sin( (V/R) \Delta t )\ sin(\Omega \Delta t) \Bigr) \\ \ \\ P'_y = R \Bigl( & cos( P_a )\ cos( (V/R) \Delta t )\ sin(\Omega \Delta t) \\ & - sin( P_a )\ sin( (V/R) \Delta t )\ sin(\Omega \Delta t) \\ & + cos(S_a)\ sin( P_a )\ cos( (V/R) \Delta t )\ cos(\Omega \Delta t) \\ & + cos(S_a)\ cos( P_a )\ sin( (V/R) \Delta t )\ cos(\Omega \Delta t) \Bigr) \\ \ \\ P'_z = R \Bigl( & sin(S_a)\ sin( P_a )\ cos( (V/R) \Delta t ) \\ & + sin(S_a)\ cos( P_a )\ sin( (V/R) \Delta t ) \Bigr) \\ \end{align} \]
 ] ]
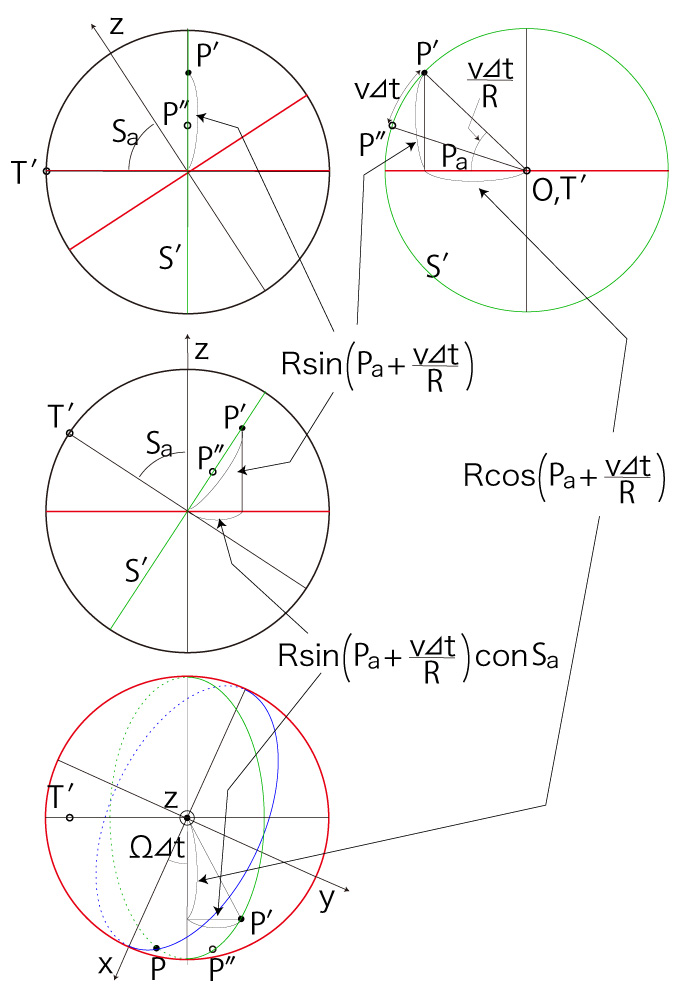
\( R\ cos( P_a + (v/R) \Delta t ) \) と \( R\ sin( P_a + (v/R) \Delta t )\ cos(S_a) \) に,つぎの関係を適用する: 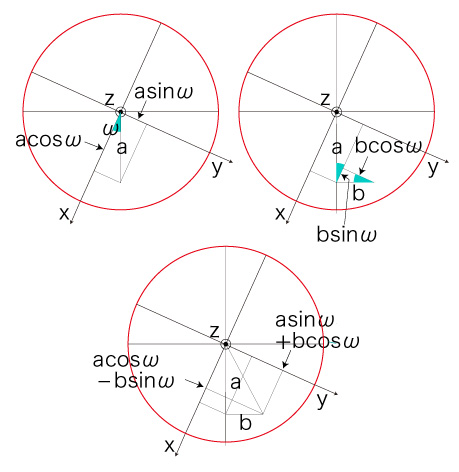
\( {\bf v'} \) は, \[ {\bf v'} = v\ ( \\ - sin( P_a )\ cos( (v/R) \Delta t ) cos(\Omega \Delta t) \\ - cos( P_a )\ sin( (v/R) \Delta t ) cos(\Omega \Delta t)\\ - cos( S_a )\ cos( P_a )\ cos( (v/R) \Delta t )\ sin(\Omega \Delta t) \\ + cos( S_a )\ sin( P_a )\ sin( (v/R) \Delta t )\ sin(\Omega \Delta t) \\ , \\ \ \\ cos( S_a )\ cos( P_a )\ cos( (v/R) \Delta t )\ cos(\Omega \Delta t) \\ - cos( S_a )\ sin( P_a )\ sin( (v/R) \Delta t )\ cos(\Omega \Delta t) \\ - sin( P_a )\ cos( (v/R) \Delta t )\ sin(\Omega \Delta t) \\ - cos( P_a )\ sin( (v/R) \Delta t )\ sin(\Omega \Delta t) \\ , \\ \ \\ sin( S_a )\ cos( P_a )\ cos( (v/R) \Delta t ) \\ - sin( S_a )\ sin( P_a )\ sin( (v/R) \Delta t ) \\ ) \\ \]
 \( {\bf w'} \) は, \[ {\bf w'} = R \Omega (\\ - cos( P_a )\ cos( (v/R) \Delta t )\ sin(\Omega \Delta t) \\ + sin( P_a )\ sin( (v/R) \Delta t )\ sin(\Omega \Delta t) \\ - cos(S_a)\ sin( P_a )\ cos( (v/R) \Delta t )\ cos(\Omega \Delta t) \\ - cos(S_a)\ cos( P_a )\ sin( (v/R) \Delta t )\ cos(\Omega \Delta t) , \\ \ \\ cos( P_a )\ cos( (v/R) \Delta t )\ cos(\Omega \Delta t) \\ - sin( P_a )\ sin( (v/R) \Delta t )\ cos(\Omega \Delta t) \\ - cos(S_a)\ sin( P_a )\ cos( (v/R) \Delta t )\ sin(\Omega \Delta t) \\ - cos(S_a)\ cos( P_a )\ sin( (v/R) \Delta t )\ sin(\Omega \Delta t) , \\ \ \\ 0 \\ ) \]
 \( {\bf v'} - {\bf v}\) は, \[ \begin{align} \longrightarrow \ \ ( & - \frac{v^2}{R}\ cos( P_a ) - v\ \Omega\ cos( S_a )\ cos( P_a ), \\ & - \frac{v^2}{R}\ cos( S_a )\ sin( P_a ) - v\ \Omega\ sin( P_a ), \\ & - \frac{v^2}{R}\ sin( S_a )\ sin( P_a ) \ ) \\ \ \\ & \ ( \Delta t \longrightarrow 0 ) \end{align} \] \( {\bf w'} - {\bf w}\) は, \[ \begin{align} \longrightarrow \ \ ( & - v\ \Omega\ cos( S_a )\ cos( P_a ) - R \Omega^2 \ cos( P_a ), \\ & - v\ \Omega\ sin( P_a ) - R \Omega^2 \ cos(S_a)\ sin( P_a ), \\ & 0 \ ) \\ \ \\ & \ ( \Delta t \longrightarrow 0 ) \end{align} \] 結論 自転球体において大円 \( S \) 上で速さvの移動は,点 \( P \) においてはつぎの加速度を受ける:
|
 \( P, \bf{v} \)-座標の \( (S_a, P_a) \) 表現
\( P, \bf{v} \)-座標の \( (S_a, P_a) \) 表現